In Teil 1 dieser Artikelserie wurden einige Grundlagen über Magnetismus und die Ursache der Deviation diskutiert.
In diesem Artikel wird die Auswirkung der Deviation und weitere Korrekturwerte für den Kompass erörtert.
Kompass vs. GPS
So mancher Leser hat sich bestimmt schon gefragt, ob „man heute nicht sowieso mit GPS fährt“. Abgesehen von der rechtlichen Situation gibt es darauf natürlich keine eindeutige Antwort „was man tut“. Es ist einerseits persönliche Geschmackssache und beides hat Vor- und Nachteile, natürlich auch die Kompassnavigation, um die es indirekt in diesem Artikel geht.
Der Magnetkompass hat zwei große Vorteile:
- Dem Kompass geht nie „der Strom aus“.
- Der Kompass ist leicht abzulesen.
Vor allem der zweite Punkt ist dann interessant, wenn man stunden-, tage-, oder wochenlang geradeaus fährt, bei Tag und/oder bei Nacht. Der Kompass ist ein analoges Gerät, so kann man (das Gehirn) in Bruchteilen einer Sekunde die Richtung erfassen und entscheiden wie man ggf. Ruder legen muss, um den Kurs zu halten.

Abb. 1: Exakte Kurslinie nach Magnetkompass.
Abb. 1 zeigt einen Track aus einer Übungsnachtfahrt. Es wurde ohne GPS ausschließlich mit Kompass gesteuert. Es wurden einige Hafennachtansteuerungen trainiert. Man sieht in dem Bild sehr deutlich wie exakt und gerade man nach dem Kompass fahren kann. Bei Seegang pendelt es natürlich, wichtig dabei ist aber nur, dass der Kurs im Mittel richtig ist. Jeder weiß, wie Digitalanzeigen, bzw. Kartenplotteranzeigen bei Seegang nervös hin und her springen und man sich unnötig konzentrieren muss.
Deviation und andere Korrekturwerte
Im vorigen Abschnitt wurden die Vorzüge des Schiffskompasses diskutiert und wie exakt man mit einem Kompass navigieren kann. Die Genauigkeit hängt aber auch davon ab, dass man den Geräten vertrauen kann, d.h. dass die Instrumente auch das anzeigen, was man erwartet.[1. Das gilt natürlich für alle Instrumente, auch das GPS. Jeder, der schon länger unterwegs ist, ist schon einmal laut GPS mit dem Schiff übers Land gefahren oder hat ein Seezeichen angeblich auf der falschen Seite passiert. 😉 ]
Wie bereits im vorigen Teil 1 dieser Artikelserie besprochen, zeigt der Kompass aber nicht exakt an, sondern er wird vom Schiffsmagnetfeld abgelenkt, d.h. der Kompass hat eine Deviation.
Die Deviation wirkt sich daher immer dann aus, wenn man den Schiffskompass zum Steuern von Kursen verwendet. Nicht, wenn man nach GPS fährt.
Es gibt noch weitere Faktoren, die sich auf die Anzeige des Schiffskompasses auswirken:
- Deviation (auch Ablekung), welche in dieser Artikelreihe im Detail behandelt wird.
- Die Missweisung (auch Deklination oder Variation genannt).
- Der Wind.
- Strömung.
Korrekturwerte, die durch Addition zu Messwerten addiert werden müssen, um den Messwert zu verbessern, werden in der Fachsprache als Beschickung bezeichnet. Die Korrekturwerte für Wind und Strömung werden deshalb auch als Beschickung für Wind/Strom bezeichnet, oder auch als Abdrift durch Wind/Strom.
Wind und Strömung werden hier im Folgenden vorerst einmal außer auch gelassen.
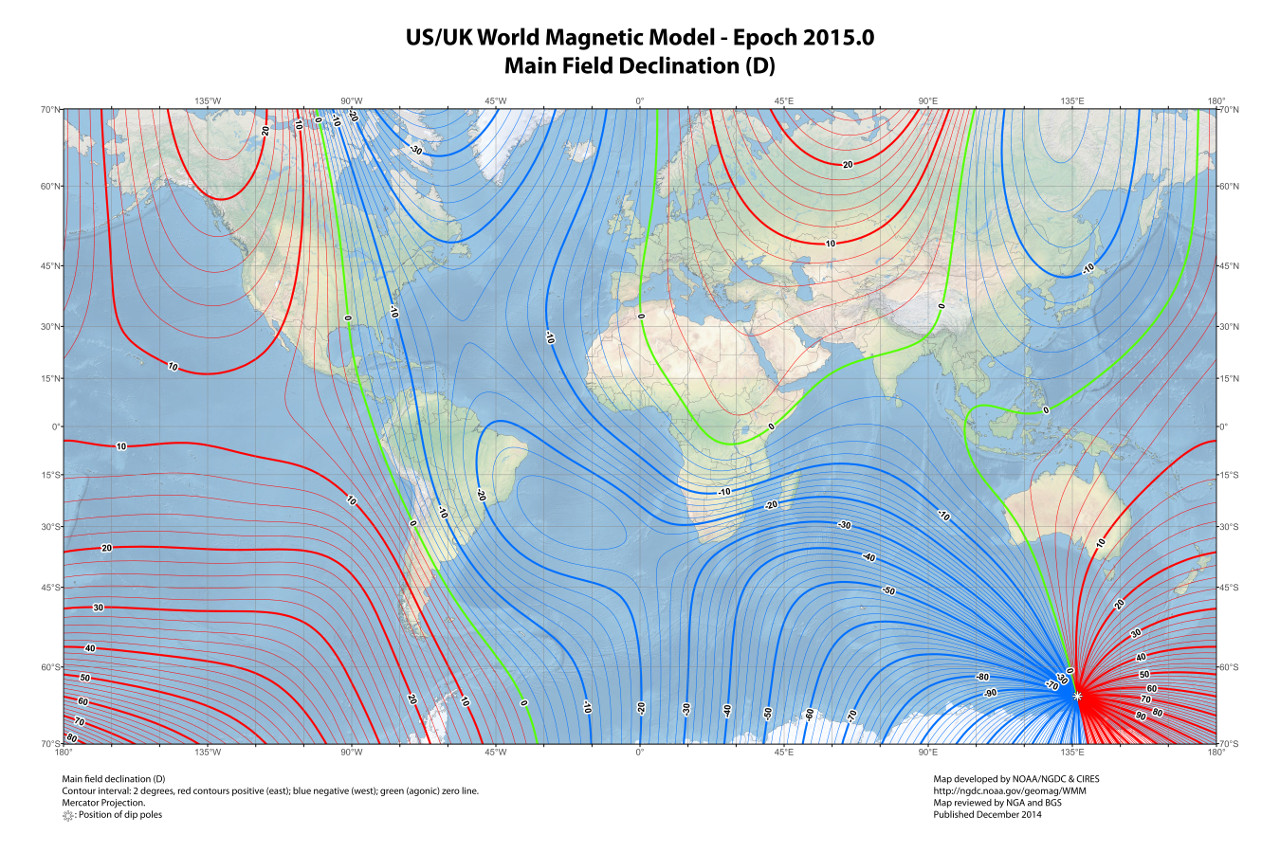
Abb. 2: Isogonenkarte 2015. Quelle: NOAA „World Magnetic Model“.
Mit der Deklination werden die Unregelmäßigkeiten des Erdmagnetfeldes erfasst. Kurz- und mittelfristig sind diese aber konstant und können aus der Seekarte, bzw. einer Isogonen-Karte (s. Abb. 2, Quelle: NOAA) abgelesen werden. In der Adria beträgt die Missweisung im Mittel derzeit 4° Ost. Fährt man immer im selben Seegebiet, könnte man die Missweisung und die Deviation zu einem Gesamtkorrekturwert zusammenfassen. Verlässt man jedoch das Heimatrevier, muss die Deviation und die Deklination separat berücksichtigt werden, da letztere in jedem Gebiet anders ist. Hier ein paar ungefähre Werte zur Vergleich:
| Adria | +4° |
| Sardinien/Korsika | +2° |
| Kanarische Inseln | -5° |
| Solent, UK | -1° |
| Deutsche Bucht, Dänemark | +1° |
Größenordnung von Kursfehlern
Wie groß der Positionsfehler ist, wenn man um einige Grade falsch navigiert, kann sehr einfach mit dem Sinussatz im gleichschenkeligen Dreieck ermittelt werden.
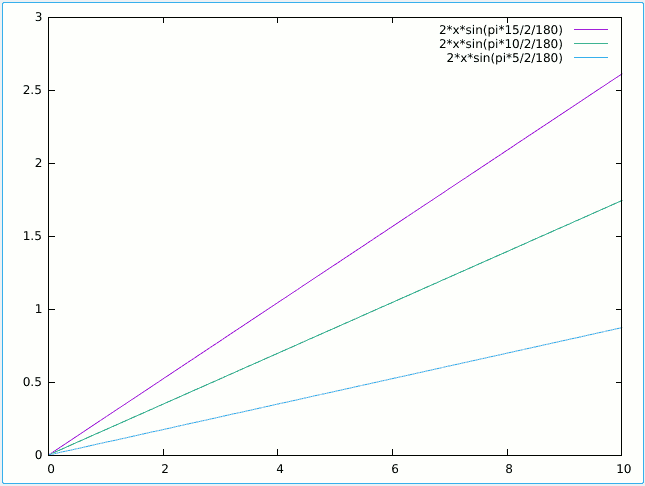
Abb. 3: Fehlerkurve bei Kursfehlern.
Abb. 3 zeigt wie der Fehler mit der gefahrenen Distanz größer wird, abhängig vom Kursfehler.
Auf der x-Achse (unten) ist die gefahrene Distanz, auf der y-Achse (links) der Positionsfehler aufgetragen. Die blaue Kurve zeigt den Kursfehler von 5°, die grüne Kurve 10° die violette Kurve 15°.
Fährt man beispielsweise 6 Seemeilen um 5° falsch, verfehlt man sein Ziel um eine halbe Seemeile. Bei 10° Fehler ist es bereits 1 Seemeilen.
Bereits eine halbe Seemeile kann in der Nacht oder bei Nebel sehr viel sein und reicht aus, um eine Hafeneinfahrt oder schmale Inselpassage zu verpassen.
Meiner Erfahrung nach sind Deviationen von ±10° in der Praxis nicht ungewöhnlich, das sind 20° zwischen Kurs und Gegenkurs.
Kompasskompensation
Die meisten besseren Schiffskompasse kann man kompensieren. Bei der Kompensation wird mit zwei kleinen, verstellbaren Magneten ein Magnetfeld erzeugt. Das stellt man so ein, dass es dem Schiffsmagnetfeld, das die Deviation verursacht, entgegenwirkt.
Das exakte Kompensieren ist allerdings nicht ganz einfach, und sehr zeitintensiv. Zusätzlich ist die Deviation im Jahresverlauf nicht konstant, das wurde in Teil 1 dieser Artikelserie gezeigt. Die Änderungen sind größer, wenn das Schiff längere Liegephasen hat (z.B. im Winter). Das bedeutet, dass ein Kompass regelmäßig nachkompensiert werden muss. Einfacher ist es daher sich von Zeit zu Zeit eine Deviationstabelle zu erstellen und die Deviation rechnerisch zu kompensieren.
Lies weiter in Teil 3 wie das Erstellen einer Deviationstabelle funktioniert.


3 Kommentare
Holger · 25. September 2017 um 06:19
Was heißt denn das genau, GPS vs. Kompass? Ich würde das nicht als gegeneinander betrachten sondern als miteinander. Wenn ich doch eine längere Strecke über offenes Wasser segele, dann muss ich mir zur Orientierung ja irgendwann mal einen Kurs aussuchen. In der Praxis würde ich dann den Autopiloten, der ja einen Kreiselkompass hat, auf den entsprechenden Kurs einstellen. Oder gibt es tatsächlich Steuerleute die einer GPS Route genau nachfahren?
eagle · 25. September 2017 um 08:42
Genau deshalb habe ich betont, dass es kein “das tut man so und so” gibt 😉
Ich weiß aber aus vielen Diskussion mit Seglern, dass das Thema “GPS” sehr kontrovers betrachtet wird, weshalb ich versucht habe, das in dem Artikel möglichst neutral darzustellen.
Autopiloten auf Yachten haben heute normalerweise einen Fluxgate-Kompass. Den Autopiloten habe ich aber deshalb hier außer acht gelassen, weil er vor allem auf Langfahrt die Batterie auffrisst. Da würde sich eine Windsteueranlage eignen. Außerdem geht es ja eigentlich um die Kompassdeviation.
Danke für die Anregung, weil ich werde auf die Deviation vom Autopilot/Fluxgate etwas schreiben, das wissen (glaub ich) auch die Wenigsten 🙂
Erstellen einer Deviationskurve, Teil 3 - freeskippers.at · 16. Oktober 2017 um 23:13
[…] im vorangegangenen Artikel über die Deviation bereits beschrieben, besteht die Differenz zwischen Kompasskurs und Kartenkurs aus zumindest vier […]